Nema 23 (57mm) kaw-loop stepper motors

> > Cov lus piav qhia luv luv
| Hom Tsav | Bipolar stepper |
| Kauj ruam | 1.8° Nws |
| Qhov hluav taws xob (V) | 2.6/3.6/4.1 |
| Tam sim no (A) | 3/4/5 |
| Kuj (Ohms) | 0.86/0.9/0.81 |
| Inductance (mH) kev | 2.6 / 4.5 / 4.6 |
| Cov Hlau Hlau | 4 |
| Tuav Torque (Nm) | 1/1.8/3 |
| Tsav Length (mm) | 55/75/112 ib |
| Encoder | 1000 CPR |
| Ambient Kub | -20 ℃ ~ + 50 ℃ |
| Kub nce | 80k Max. |
| Dielectric zog | 1 mA Max.@ 500V, 1KHz, 1Sec. |
| Rwb thaiv tsev Resistance | 100MΩ Min.@500 Vdc |
> > piav
Pkev ua tau zoo
Muaj peev xwm thauj khoom loj, qhov kub tsis tshua muaj siab, me me vibration, tsis tshua muaj suab nrov, ceev ceev, ceev teb, ua haujlwm zoo, lub neej ntev, qhov tseeb qhov tseeb (txog 0.005mm)
Adaim ntawv thov
Cov cuab yeej kuaj mob, cov cuab yeej tshawb fawb txog lub neej, cov neeg hlau, cov khoom siv laser, cov cuab yeej tshuaj ntsuam xyuas, cov khoom siv semiconductor, cov khoom siv hluav taws xob ntau lawm, cov khoom siv tsis yog cov txheej txheem automation thiab ntau yam khoom siv automation
> > ntawv pov thawj

>> Hluav taws xob Parameters
| Lub cev muaj zog | Lub zog / Theem (V) | Tam sim no / Theem (A) | Kev tiv thaiv / Theem (Ω) | Inductance / Theem (mH) | Tus naj npawb ntawm Cov Hlau Hlau | Rotor Inertia (g.cm2) | Tuav Torque (Nm) | Lub cev muaj zog L (mm) |
| 57 | 2.6 | 3 | 0.86 ib | 2.6 | 4 | 300 | 1 | 55 |
| 57 | 3.6 | 4 | 0.9 ua | 4.5 | 4 | 480 | 1.8 | 75 |
| 57 | 4.1 | 5 | 0.81 ib | 4.6 | 4 | 800 | 3 | 112 |
> > General technical parameters
| Radial clearance | 0.02 hli Max (450g load) | Rwb thaiv tsev tsis kam | 100MΩ @ 500VDC |
| Axial clearance | 0.08 hli Max (450g load) | Dielectric zog | 500VAC, 1mA, 1s @ 1KHZ |
| Max radial load | 70N (20mm ntawm flange nto) | Rwb thaiv tsev chav kawm | Chav Kawm B (80K) |
| Max axial load | 15 N | Ambient kub | -20 ℃ ~ + 50 ℃ |
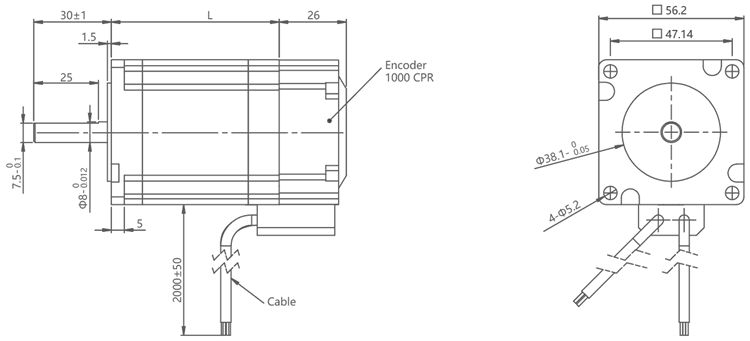
>> 57IHS2XX-X-4A lub cev muaj zog daim duab
| Pin configuration (Differential) | ||
| Pin | Kev piav qhia | Xim |
| 1 | + 5 V | Liab |
| 2 | GND | Dawb |
| 3 | A+ | Dub |
| 4 | A- | Xiav |
| 5 | B+ | Daj |
| 6 | B- | Ntsuab |





